










Este módulo es esencial a la hora de controlar varios motores servo a la vez (hasta 16), ya que permite con el controlador integrado entregar los pulsos PWM a los motores sin tener al microcontrolador principal (Arduino) ocupado en esta tarea, un esquema típico de conectividad sería el siguiente:

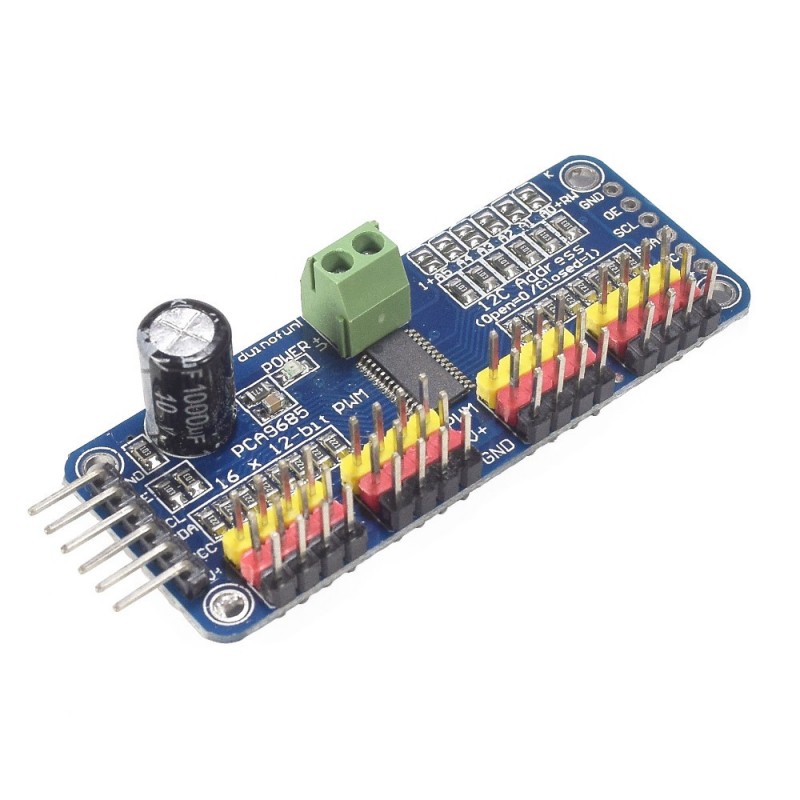
El Módulo Controlador de servos PCA9685 tiene la placa diseñada para el control de servos, tiene los pines en el orden correcto para simplemente conectar los servomotores, además una bornera para la alimentación de los servos y conectores para la alimentación de la parte lógica junto con los pines I2C para comunicarse con arduino.
Se puede establecer la dirección I2C soldando los puentes A0-A5 con esto podemos usar el mismo bus I2C para controlar más módulos PCA9685 u otros dispositivos I2C
EL PCA9685 nos permite controlar individualmente 16 salidas PWM con 12 bits de resolución y con frecuencia máxima de 1600Hz.


