




Introducción
Al momento de elegir un motor eléctrico para una aplicación en robótica o cualquier sistema mecánico, es crucial definir los parámetros técnicos del motor que nos permitirán llevar a cabo nuestro proyecto. Existen varios tipos de motores, sin embargo aquí describiremos los más comunes, que son: Motores de Corriente Continua, Servomotores y Motores Paso a Paso (PAP). En este texto, trataremos de explicar en términos muy simples el funcionamiento y sus características principales para que puedas tener una idea de qué motor necesitas para tu proyecto.
Qué son las RPM?
Las RPM es una unidad de medida de la velocidad de giro del eje del motor. RPM significa Revoluciones por Minuto, por ejemplo, si un motor tiene 100 RPM, significa que en 1 minuto el eje del motor da 100 vueltas. Claramente estas unidades se pueden expresar en distintas formas, como rev/s (revoluciones por segundo), rad/s (radianes por segundo), etc.
Qué es el torque?
El torque es la fuerza que el motor puede generar cuando está girando o detenido. En el diseño de un sistema, es fundamental tener en cuenta el torque necesario para mover la carga de manera adecuada, ya que este determinará si el motor es capaz de superar la resistencia ofrecida por la carga y, por lo tanto, si el sistema funcionará de manera eficiente y sin fallos. Existen varios tipos de torque, entre los cuales destacan:
-
Torque de arranque: Es el torque necesario para iniciar el movimiento de una carga desde el reposo para vencer su inercia.
-
Torque máximo: Es el mayor torque que el motor puede generar antes de detenerse o sobrecalentarse.
-
Torque de retención: Es la fuerza que el motor puede aplicar cuando el eje está detenido, manteniéndolo en una posición fija. Este tipo de torque genera el mayor consumo eléctrico, ya que el motor necesita energía constante para mantener la posición.
-
Torque nominal: Es el torque que el motor puede generar de manera continua sin sobrecalentarse o sufrir daños.
El tipo de torque a utilizar para un diseño está determinado por la aplicación o tarea específica del motor. Por ejemplo, si se trata de mover una puerta automática, el torque de retención es crucial para mantener la puerta en una posición fija cuando no se está moviendo, mientras que el torque de arranque es importante para iniciar el movimiento.
Las unidades del torque son [Fuerza][Distancia], por ejemplo, un motor de 10 Kgcm significa que, en ciertas condiciones de operación, este motor puede mover un peso de 10 Kg a una distancia de 1 cm del centro del eje, considerando que el peso está perpendicular al radio del motor.
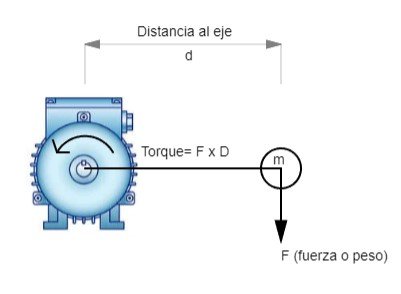
en el esquema anterior, la carga se muestra en un punto, cuestión que en la práctica no suele ser así, porque, por ejemplo, pudiéramos querer girar una rueda de un vehículo que tiene un peso determinado y en este caso, la fuerza corresponde al roce debido al peso del vehículo aplicada en el punto de contacto de la rueda con el suelo. Otro factor a tener en cuenta para el cálculo del torque necesario de un motor, es la Inercia de la carga, que corresponde a al fuerza necesaria para sacar un cuerpo de su estado de reposo o en movimiento uniforme, es decir, para acelerarlo. La inercia depende de la geometría del cuerpo y la masa de él. Normalmente el mayor torque de un motor se usa para sacar un cuerpo del estado de reposo, según sea la aceleración necesaria.
Qué es y cómo se usa la Potencia de motor?
La potencia de un motor corresponde a la energía que consume el motor por unidad de tiempo, normalmente ésta se refiere a la energía máxima que puede entregar un motor por unidad de tiempo en uso continuo, sin sufrir daños o sobrecalentamiento, o también descrita como «Potencia Nominal«. La unidad de medida más común es el Watt [W], que se usa en motores pequeños de baja potencia y los HP que se usa en los motores de mayor potencia. La potencia de un motor se puede referir tanto al consumo eléctrico (potencia de entrada) del motor como a la energía mecánica que puede desarrollar en el eje del motor (potencia de mecánica).
Potencia Eléctrica (Pe): La potencia de entrada se refiere a la potencia en el consumo eléctrico, la cual se puede calcular por la fórmula Pe=V x I (Voltaje en Voltios x Corriente de consumo en Ampres), cuando este valor se muestra en las características del motor, ésta refiere a la Potencia Nominal.
Potencia Mecánica (Pm): Es la que se obtiene en el eje del motor después que la energía eléctrica (Pe) se transforme en energía mecánica. Se puede calcular como Pm=Torque x Velocidad de giro, para ello debemos conocer la fuerza perpendicular al radio de giro del eje y la velocidad de giro (en rad/s).
Eficiencia del motor (Ro): Hay que tener en cuenta que una parte de la energía eléctrica se pierde en el camino a transformarse en energía mecánica debido a varios factores, principalmente calor. La razón entre la Pm y Pe es la «Eficiencia del motor», Ro=Pm/Pe. Por lo tanto si conoces la eficiencia del motor y la potencia de consumo eléctrico, la cual es bastante simple de medir con un amperímetro, fácilmente podrás conocer la potencia de salida mecánica usando la fórmula Pm=Ro x Pe.
La eficiencia (Ro) es la relación entre la potencia mecánica (Pm) y la potencia eléctrica (Pe), dada por la fórmula Pe = Pm / Ro. De esta manera, se puede determinar cuánta energía eléctrica se requiere para obtener la potencia mecánica deseada. Entonces, si ya conocemos la Pm, con la fórmula mencionada Pm=Torque x (Velocidad de giro), podemos obtener el Torque que el motor es capaz de hacer: Torque = Pe x Ro / (Velocidad de Giro) , normalmente podemos conocer la Pe y Ro, que son datos que los fabricantes entregan. Si no los encuentras en las tablas, Ro lo puedes aproximar a 80% en motores de este tipo sin caer en gran error. Si no encuentras la Pe, puede que tengamos la corriente máxima que soporta el motor y el voltaje de trabajo que usaremos, entonces la Pe se calcula como Pe= V x Imax.
El consumo eléctrico de un motor funcionando depende de varios factores, principalmente es la carga (o torque externo), la corriente en sus bobinas aumenta o disminuye en la medida que la carga varía. Un motor al cual se le hace una fuerza tal que el eje deje de girar, éste consumirá su máxima corriente llamada «corriente de retención», que se produce con un «torque de retención«, no se debe confundir esta corriente con la corriente «nominal», en general no es una condición normal que un motor se detenga por carga, esto podrá causar daños en el motor, especialmente en su embobinado y lo podrá «quemar».
Tipos de Motores
En el mundo de la robótica y los sistemas mecánicos, los motores más comunes son el motor de corriente continua (CC), el servomotor, el motorreductor y el motor Paso a Paso (PAP). A continuación, se describirá cada uno de ellos:
Motor de corriente continua (CC):
Ejemplo de imagen común de un motor de CC: 
El motor de corriente continua es el tipo de motor muy utilizado en varias aplicaciones, especialmente donde se requieren altas RPM, como transmisión a ruedas, hélices para drones, ventiladores o extractores, etc. Su principal ventaja es que se puede proporcionar un buen control de velocidad variando el voltaje nominal en un rango adecuado (+- 25%), eso sí, en desmedro o a favor del torque, menos voltaje: menor velocidad y menos torque, mayor voltaje: más velocidad y mayor torque. La principal desventaja es su difícil su posicionamiento controlado, no podemos saber con certeza en qué posición o ángulo está el eje, por otra parte el sentido de giro sólo se puede realizar invirtiendo la polaridad de la alimentación, lo cual se puede hacer con interruptor mecánico o con un circuito electrónico de inversión de polaridad llamado «Puente H» como éste.
El TORQUE en estos motores, como no tienen reducción por engranajes, en general son de bajo torque pero altas RPMs, por lo que son ideales en aplicaciones de velocidad. Si se requiere torque, se puede reducir su velocidad añadiendo una combinación de engranajes o poleas que disminuya la relación de transmisión.
El control de velocidad de estos motores se puede hacer variando su voltaje o bien con pulsos llamados PWM (Pulsos de ancho modulado) que se pueden obtener desde un circuito generador de pulsos PWM o bien directamente desde los pines de un microcontrolador como Arduino, los pulsos PWM tienen la ventaja de mantener en mejor medida el torque al variar la velocidad. Los dispositivos usados para este propósito son múltiples según sea la aplicación y el tamaño del motor, ejemplos de estos circuitos 1, 2, 3
La transmisión de la energía eléctrica al eje del motor se realiza comúnmente con bobinas giratorias e imanes permanentes, siendo el uso de «escobillas con carbones» la forma más común de transferencia de corriente hacia las bobinas giratorias. Esta condición hace que este tipo de motor tenga una eficiencia de transmisión de energía eléctrica a mecánica aproximadamente del 80%. Cuando este dato está disponible, es útil para calcular el torque de salida al conocer la potencia de consumo del motor mediante la fórmula: T=(potencia eléctrica) * Eficiencia / (Velocidad de giro del motor), si la eficiencia no es un dato disponible, puede considerar un valor de 80%.
Parámetros técnicos a tener en cuenta en los motores de CC:
Torque (T): Es la fuerza que produce el motor para hacer girar un objeto. Se mide en unidades de Newton metro (Nm) o también en (Kg*cm). La fórmula para calcular el torque es: T = Kt * I, donde Kt es la constante de torque del motor y I es la corriente que fluye a través del motor.
Velocidad (N): Es la velocidad angular del motor, medida en revoluciones por minuto (RPM). La fórmula para calcular la velocidad es: N = Kv * V, donde Kv es la constante de velocidad del motor y V es el voltaje aplicado al motor.
El Motorreductor


El Motorreductor combina un motor de corriente continua (alterna también puede ser, pero en robótica es menos común) con un sistema de reducción de velocidad mediante engranajes, aumentando considerablemente el torque a costa de reducir la velocidad de giro del eje. La velocidad de estos motores también se puede controlar utilizando PWM (Pulsos de Ancho Modulado), lo cual permite una regulación eficiente sin perder demasiado torque.
-
Ventajas: Alto torque a bajas velocidades, capacidad de mantener la posición sin perder torque, basta con aplicar el voltaje adecuado para su funcionamiento y control sencillo con módulos PWM.
-
Desventajas: Menor velocidad de salida debido a la reducción, y generalmente no es adecuado para aplicaciones que requieren alta precisión en la posición del eje, para invertir el giro es necesario un circuito especial llamado Puente H o bien invertir manualmente su polaridad.
-
Ejemplo de aplicación: Especialmente útil en sistemas de elevación, robots móviles y maquinaria industrial donde se necesita un movimiento suave y controlado con fuerza. Por ejemplo, las ruedas de un vehículo que necesita subir fuertes pendientes con obstáculos.
-
Consideraciones para su elección: Se debe considerar si el sistema requiere una alta fuerza a baja velocidad y si el tamaño del motor reductor es adecuado para la aplicación específica.
El Servomotor

Ideal para aplicaciones que requieren un control preciso de la posición. Utiliza un circuito interno de retroalimentación para mantener su posición, pero su funcionamiento en es base a un motorreductor.
-
Ventajas: Control preciso de la posición, alta eficiencia energética y capacidad de mantener la posición sin perder torque, fácil control de cambio de giro
-
Desventajas: Limitado a aplicaciones de bajo torque de posicionamiento angular, normalmente se limitan a trabajar en un rango de 0 a 180 grados. Su costo suele ser mayor comparado con motores de CC. Requiere de un control por pulsos PWM, lo que hace necesario el uso de un controlador que tenga estas señales, como Arduino.
-
Ejemplo de aplicación: En un brazo robótico que necesita mover objetos a posiciones específicas con precisión. El servomotor es ideal para garantizar que el brazo pueda alcanzar y mantener una posición exacta sin errores.
-
Consideraciones para su elección: Se debe considerar la carga que se desea mover, la precisión necesaria y si el sistema requiere retroalimentación para ajustar la posición en tiempo real.
Motor Paso a Paso (PAP):

Estos motores se mueven en pasos precisos, lo que los hace ideales para aplicaciones que requieren un control muy preciso de la posición. Funcionan mediante bobinas electromagnéticas que se energizan de manera secuencial, creando un movimiento escalonado del eje. La precisión de estos motores depende del número de pasos por revolución, típicamente entre 200 y 400 pasos, lo que les permite tener un control muy detallado de la posición.
-
Ventajas: Control preciso de la posición sin la necesidad de un sistema de retroalimentación, alta repetibilidad y simplicidad en el control.
-
Desventajas: Bajo torque a altas velocidades y pérdida de pasos si la carga excede la capacidad del motor. Se requiere de un circuito controlador de pasos como este.
-
Ejemplo de aplicación: Utilizado en impresoras 3D y sistemas CNC donde se requiere precisión en cada movimiento.
-
Consideraciones para su elección: Se debe evaluar la cantidad de pasos requeridos según l precisión deseada, la carga a mover, utilización de un circuito controlador de pasos.