













CARACTERISTICAS GENERALES:
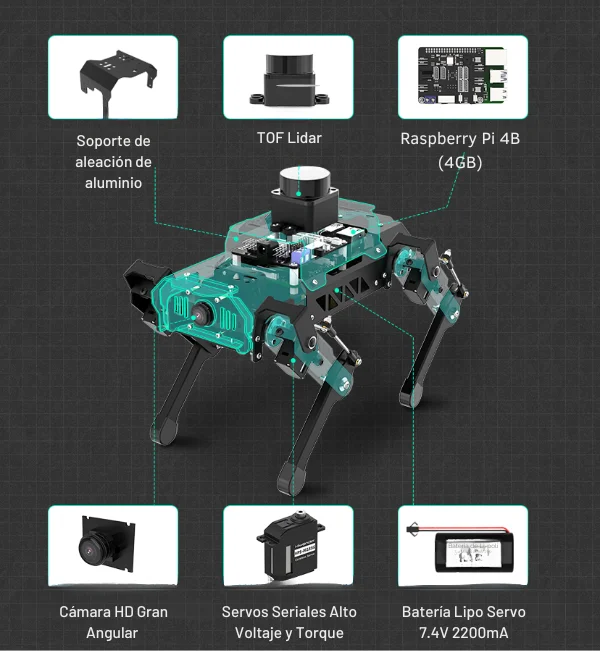
- Impulsado por Raspberry Pi y Coreless Servos PuppyPi PRO es un robot cuadrúpedo con visión de IA impulsado por Raspberry Pi CM4 de 4 GB y construido sobre el sistema operativo del robot (ROS). Está equipado con 8 servos sin núcleo de acero inoxidable, que ofrecen un rendimiento de alta precisión, una velocidad de rotación rápida y un par robusto de 8 kg.cm. Con un sensor IMU, PuppyPi Pro puede detectar su postura en tiempo real, lo que permite capacidades de autoequilibrio.
- Visión AI, creatividad ilimitada PuppyPi PRO está equipado con una cámara gran angular HD con una resolución de 100 W-píxeles. Utiliza la biblioteca OpenCV para un procesamiento de imágenes eficiente, lo que permite una amplia gama de aplicaciones de IA, incluido el reconocimiento y localización de objetivos, seguimiento de líneas, evitación de obstáculos, detección de rostros, lanzamiento de pelotas, seguimiento de colores y reconocimiento de trapos.
- Varios métodos de control y transmisión de cámara en vivo FPV Puedes controlar cómodamente PuppyPi PRO a través de la aplicación WonderPi disponible para dispositivos Android e iOS, software de PC o un mango inalámbrico de PS2. Además, PuppyPi PRO proporciona una experiencia de perspectiva en primera persona al transmitir la transmisión de la cámara en vivo a la aplicación.
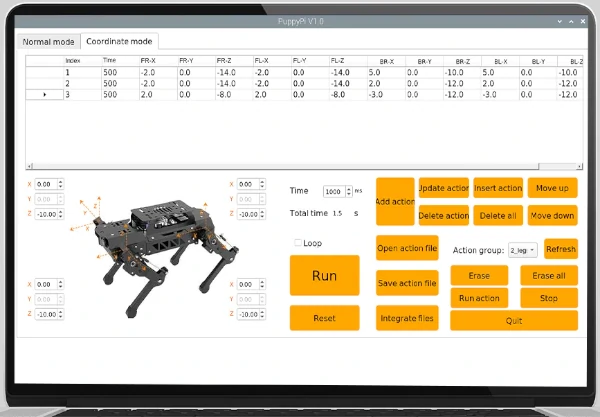
- Planificación de la marcha, ajuste libre PuppyPi PRO incorpora un algoritmo cinemático inverso que ofrece un control preciso sobre el tiempo de contacto, el tiempo de elevación y la altura elevada de cada pierna. Puede ajustar fácilmente estos parámetros para lograr diferentes modos de andar, incluidos el ondulación y el trote. Además, PuppyPi Pro proporciona un análisis detallado de la cinemática inversa, junto con el código fuente de la función de cinemática inversa.
- LIDAR PuppyPi PRO amplía sus capacidades con un mini lidar TOF. Este sensor Lidar permite a PuppyPi realizar un escaneo láser de 360 grados de su entorno y ejecutar varias funciones avanzadas como localización sincrónica, mapeo autónomo, navegación multipunto, planificación de ruta TEB, evitación dinámica de obstáculos y capacidades SLAM avanzadas
CARACTERÍSTICAS TÉCNICAS DETALLADAS:
- Impulsado por Raspberry Pi 4B 4GB.
- Basado en el Robot Operating System (ROS).
- 8 DOF con servos seriales HPS-0618SG 180° sin núcleo de acero inoxidable con un torque de 8 Kg*cm.
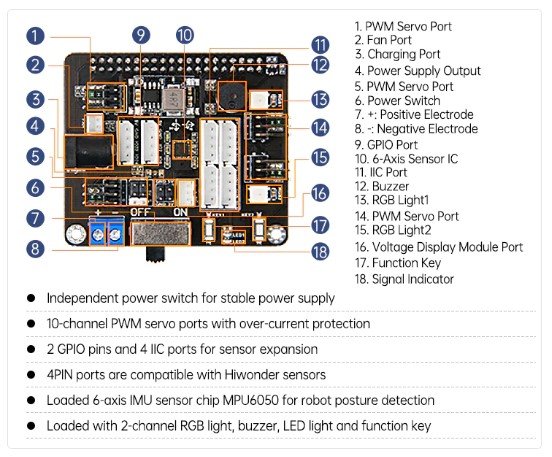
- Todos los servomotores pueden ser monitoreados en posición, voltaje y temperatura.
- Módulo de expansión para sensores y/o actuadores adicionales.
- Incluye todo el código en Python y APP para su control de funciones
- Sensor IMU para detección de postura y autoequilibrio.
- Cámara HD de gran angular de 120° con resolución de 100W-píxeles.
- Diversas opciones de control incluyendo aplicación móvil, software de PC y mando PS2 (opcional).
- Algoritmo de cinemática inversa para ajuste de la marcha.
- Opción de expansión con mini lidar TOF (versión PRO), permite el upgrade fácilmente.
- Batería Lipo de alta tasa de 7.4V 2200mAh 20C con una duración de trabajo de 60 minutos.
- Estructura de aleación de aluminio para resistencia a caídas y colisiones.
- Módulo de visualización de voltaje para monitorización del nivel de batería
- Tamaño: 266 x 149 x 190
- Peso: 720 g Aprox.
- Tamaño Paquete: 315x315x165 mm
Definiciones utilizadas en las descripciones:
LIDAR: «Light Detection and Ranging» (Detección y Medición por Luz). Es una tecnología de teledetección que mide la distancia a un objeto o superficie utilizando pulsos láser.
ROS: Sistema Operativo de Robot – Una plataforma de software para desarrollo robótico.
Cinemática Inversa: Técnica de computación que parte de la posición deseada del extremo robot y se trabaja hacia atrás para encontrar los ángulos y movimientos necesarios en las articulaciones para lograr esa posición.
IMU: Unidad de Medición Inercial – Sensor que detecta el movimiento y la orientación en tiempo real.
IA: Inteligencia Artificial – Tecnología que permite a los robots procesar y responder a datos como el reconocimiento de imágenes.
HD: Alta Definición – Referente a la resolución de la cámara del robot, indicando alta calidad de imagen.
OpenCV: Biblioteca de Visión por Computadora – Un software utilizado para el procesamiento de imágenes y aplicaciones de visión artificial.
FPV: Vista en Primera Persona – Técnica que permite ver desde la perspectiva del robot a través de su cámara.
TOF: Time-of-Flight (Tiempo de Vuelo) – Tecnología usada en sensores para medir distancias mediante la detección del tiempo que tarda una señal en regresar al sensor.
SLAM: Mapeo y Localización Simultáneos – Técnica avanzada en robótica para mapeo y navegación autónomos.
PS2: PlayStation 2 – En este contexto, se refiere probablemente a un tipo de control inalámbrico compatible con el robot.
DOF: «Degrees of freedom», Grados de libertad, cantidad de direcciones en las que el robot tiene movimientos simultáneos e independientes por sus motores.










Módulo de Expansión e Interface con Raspberry Pi 4B y sensores Hiwonder:
Software para PC para programar acciones de movimientos incluyendo cinemática inversa (pones el robot manualmente en la posición deseada y luego grabas su posición como una acción):
Control en primera persona:

Control por programación Phyton y APP en tu celular:

Control automático de estabilidad gracias a su IMU incorporado:
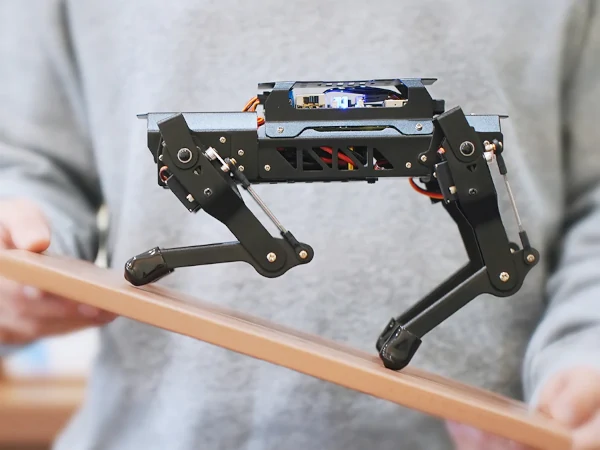

Dimensiones del robot:

Contenido de la caja de la versión PRO (robot completamente armado):

Encuentra todos los recursos de Robot AQUÍ
¿Qué es ROS?
ROS, que significa Robot Operating System (Sistema Operativo para Robots), es un marco flexible para escribir software para robots. No es un sistema operativo en el sentido tradicional, sino más bien un conjunto de herramientas y bibliotecas diseñadas para ayudar en el desarrollo de software para robots. Algunas de sus características clave incluyen:
- Abstracción de Hardware: ROS proporciona una manera de acceder a los sensores y actuadores de diferentes robots de manera uniforme.
- Controladores de Dispositivos: Tiene una amplia gama de controladores para una variedad de sensores y actuadores.
- Bibliotecas Poderosas: Ofrece bibliotecas para realizar tareas comunes en robótica como la planificación de movimientos, la percepción, la simulación, etc.
- Comunicación entre Procesos: Facilita la comunicación entre diferentes procesos, tanto en el mismo robot como entre diferentes robots, a través de mensajes, servicios y acciones.
- Herramientas de Desarrollo: Viene con una serie de herramientas para ayudar en el desarrollo y depuración de software para robots.
- Comunidad y Soporte: Al ser un proyecto de código abierto, cuenta con una amplia comunidad de desarrolladores y usuarios que contribuyen constantemente con nuevas herramientas y mejoras.
ROS es ampliamente utilizado en la investigación y en la industria, ya que facilita el desarrollo de software complejo para robots, permitiendo que los desarrolladores se concentren más en las tareas específicas de sus proyectos y menos en los detalles de bajo nivel de la comunicación con el hardware y la gestión de procesos.







